패턴인식
처리과정

- 형태소 해석기 : A/D변환, 표본화, 양자화
- 전처리 : 정규화, 잡음제거
- 특정추출 : 영역분할, 변환
- 인식/식별 : 패턴매칭, 통계적 결정, 구문형 해석, 구조 해석적 기법
- 문제(problem)
- 패턴인식시스템
- 해결(solution)
패턴의 강조
- sharpening
- High Frequency Emphasis - high boost spatial filtering


노이즈 제거
- Order Filter (none-linear filter)
- Median filter : gray 크기순으로 정렬하여 가운데 값을 선택, 윈도 크기와 범위가 의미 있고 윈도안의 값은 의미가 없다. edge 성분이 무뎌지며, 마스크 사이즈가 클수록 smoothing 효과가 커져 blur 현상이 나타남.
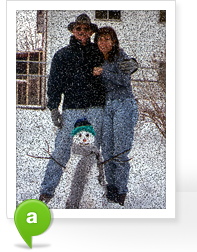
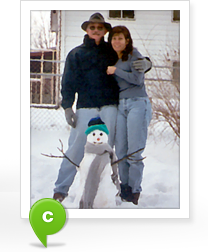
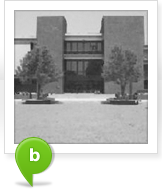
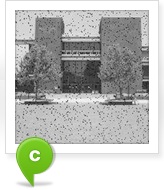
- (a) Image with added salt-and-pepper noise, the probability for salt=probability for pepper=0.08. (b) After median filtering with a 3x3 window, all the noise is not removed. (c) After median filtering with a 5x5 window, all the noise is removed, but the image is blurry acquiring the “painted” effect.
- Minimum filter : gray 순으로 정렬하여 가장 작은값을 가운데 값으로 변경. 노이즈제거효과 (salt noise)는 밝은 noise 이기때문에 낮은값이 선택되어 이미지가 전체적으로 어두운 이미지가 됨
- Maximum filter : pepper 노이즈 제거에 효과적이며 이미지가 전체적으로 밝아지게 된다.
- (a) Image with “salt” noise; probability of salt=0.04. (b) Result of minimum filtering image (a); mask size=3x3. (c) Image with “pepper” noise; probability of pepper=0.04. (d) Result of maximum filtering image (c); mask size=3x3.
- Smoothing
- Mean filter - linear filter : arithmetic filter산술평균값 계산
- 윈도내 오리지날 이미지의 산술평균 값을 계산하여 적용. 윈도 또는 mask 내의 값도 의미가 있다.
- Gaussian filter를 사용하면 Median filter 보다 Blur 효과가 줄어든다.
특징추출
- Robert operator
- 가장간단한 형태의 egde검출 연산자.
- Mask 사이즈가 작아 처리가 간단하다.
- Binary Image에 적합
- gray값이 변화되는 지점을 찾을 수 있으나 방향정보는 찾을 수 없다.
- 깊이에 대한 edge 검출 불가
- Mask size가 작기 때문에 noise에 민감하다.

- Sobel operator : 검출되는 edge의 방향성이 있고, Robert operator 보다 noise에 덜민감하다.

- Prewitt Operator

- Laplacian Gaussian :

- 주심부분 +, 외부는 -인 Mask
 과 : 둘다 edge 검출연산자이나 스케일의 차이가 없다.
과 : 둘다 edge 검출연산자이나 스케일의 차이가 없다.- 은
 함수를 결합하여 여러개의 edge 스케일을 검출할 수 있다.
함수를 결합하여 여러개의 edge 스케일을 검출할 수 있다.  에 의해 폭을 결정 할수 있기 때문에 값이 클수록 Blur 효과가 커진다.
에 의해 폭을 결정 할수 있기 때문에 값이 클수록 Blur 효과가 커진다.
- Difference Of two Gaussian :

- 각각 값이 다른 두 개의 함수의 차이 값으로 edge 검출
 일 때
일 때
- , 는 각각 다른 Scale의 edge를 검출 할 수 있다.
- Blur의 정도는 값에 따라 다르며 가 클수록 Blur현상이 크진다.
- 결론
- noise가 없는 이미지일 경우, Robert operator, Sobel operator, Prewitter operator 에서 별 차이가 없으나 noise가 있는 경우 edge 검출에 차이가 있으며, Mak Size가 작을수록 noise에 민감하다.
- , : 등방성의 edge 검출연산자로 noise에 민감하지 않으나, 계산이 오래걸림
- Robert operator, Sobel operator, Prewitter : Mask 사이즈가 작은 간단한 edge 검출연산자로 noise에 민감하다.
관련문서
QR 코드